For quite some time now, the Weekly Robotics website layout was bugging me. It was a bit all-over the place with many legacy issues, so I spent the last two weeks redesigning it. You can see the result here. Applying the 80-20 rule to it, I believe I'm 80% done, and the remaining 20% are these things that take a long time to narrow down and fix, and I'm looking forward to some continuous improvements here.
Another big change that's coming is that I'll be sunsetting the current LinkedIn format of the newsletter in about two weeks. You might be thinking, "There are close to 13,000 subscribers on LinkedIn and you are going to nuke it. Are you stupid?". Well, maybe, but it's time to take a leap and make the Weekly Robotics stand on its own two legs!
Perception and Adaptability | Inside the Lab with Atlas
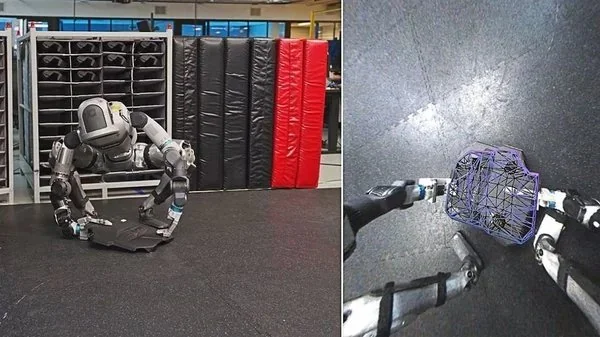
Boston Dynamics showcased this demo, where you can see the world through Atlas eyes. There are a couple of things that I found interesting in this feature:
- The engine cover mesh reconstruction and pose estimation
- Full-body trajectory planning when picking a cover from the floor
- All the cameras present in the head
- A view of some internal tooling and at least one dev using Ubuntu 22 (I’m basing this on a wallpaper visible at one point)
- The hand manipulation versatility visible in 4:22
All in all, it’s an interesting look at the perception capabilities of this robot.
Learning coordinated badminton skills for legged manipulators

Researchers from the Robotic Systems Lab at ETH Zurich taught the ANYmal quadruped to play badminton, with some excellent results. The system utilizes all robot joints when playing and everything is done through the onboard perception. You can find a summary video of this research on YouTube.
Controlling a 6DOF Robot Arm with ros2_control

In this article, Michael Hart describes a ros2_control code example for a manipulator following a trajectory with a robot manipulator. This might be a great intro, if you want to start looking into this library.
How Self Balancing Robots Work! (Theory, Components, Design, PID)

This is a very high-quality video with an overview of what’s needed to create a self-balancing robot. Very neat!
Transformer & Optimization Based High Altitude GPS-Denied Fusion
In this ArduPilot forum post, Sanket Sharma describes his work on implementing vision-based position estimation for GPS-denied cases, with some very interesting results. Huge thanks to Pierre Kancir for sending this link over.
Congratulations to the #ICRA2025 best paper award winners
Robohub has a concise list of the ICRA2025 papers. Have a nice read!
Amazon Drone Crash Lands in Arizona Apartment Complex

Just last week, I featured the news of Amazon delivery drones crashing during testing, and I said I wouldn’t be too worried about that incident. This one sounds quite a bit more dangerous, and I would love to see a detailed report on this incident.
Events
- Energy Drone & Robotics Summit 2025: Jun 16 - Jun 18, 2025. Houston, Texas, United States of America
- Robotics: Science and Systems 2025: Jun 21 - Jun 25, 2025. Los Angeles, California, United States of America
- Automatica 2025: Jun 24 - Jun 27, 2025. Munich, Germany
- RoboCup 2025: Jul 15 - Jul 21, 2025. Salvador, Brazil
- Open Source Summit 2025 North America: Jul 23 - Jul 25, 2025. Denver, United States of America
- Open Source Summit 2025 Europe: Aug 25 - Aug 27, 2025. Amsterdam, Netherlands
- Commercial UAV Expo: Sep 02 - Sep 04, 2025. Las Vegas, United States of America
- CppCon 2025 (robotics track): Sep 13 - Sep 19, 2025. Aurora, Colorado, United States of America
- ROSCon UK 2025: Sep 15 - Sep 17, 2025. Edinburgh, United Kingdom
- Actuate 2025: Sep 23 - Sep 24, 2025. San Francisco, California, United States of America
For more robotic events, check out our event page.
Want to promote your product or service in Weekly Robotics? Check out our advertising options.